Model::Calm Class Reference
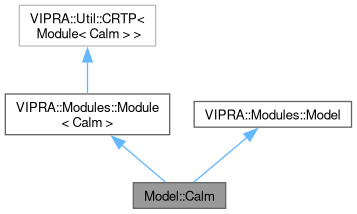
Inheritance diagram for Model::Calm:
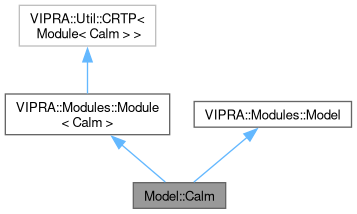
Collaboration diagram for Model::Calm:
Public Member Functions | |
| VIPRA_REGISTER_PARAMS (VIPRA_PARAM("meanMass", _config.meanMass), VIPRA_PARAM("massStdDev", _config.massStdDev), VIPRA_PARAM("meanMass", _config.meanMass), VIPRA_PARAM("massStdDev", _config.massStdDev), VIPRA_PARAM("meanReactionTime", _config.meanReactionTime), VIPRA_PARAM("reactionTimeStdDev", _config.reactionTimeStdDev), VIPRA_PARAM("meanMaxSpeed", _config.meanMaxSpeed), VIPRA_PARAM("maxSpeedStdDev", _config.maxSpeedStdDev), VIPRA_PARAM("meanShoulderLen", _config.meanShoulderLen), VIPRA_PARAM("shoulderLenStdDev", _config.shoulderLenStdDev), VIPRA_PARAM("collisionRange", _config.collisionRange), VIPRA_PARAM("friction", _config.frictionCoef)) VIPRA_MODEL_RESET | |
| _collision | initialize (_config.collisionRange, pedset) |
| calc_neighbors (pedset, goals, map) | |
| calc_betas () | |
| if (timestep % 100==0) _collision.race_detection(pedset | |
| update_state (pedset, goals, state, deltaT) | |
 Public Member Functions inherited from VIPRA::Modules::Module< Calm > Public Member Functions inherited from VIPRA::Modules::Module< Calm > | |
| void | register_params (Parameters ¶mIn) |
| Registers the modules parameters with the parameter reader. | |
| void | config (Parameters ¶mIn, VIPRA::Random::Engine &engine) |
| Loads in all parameters for the module. | |
| Public Member Functions inherited from VIPRA::Modules::Model | |
| Model (const Model &)=default | |
| Model (Model &&)=default | |
| auto | operator= (const Model &) -> Model &=default |
| auto | operator= (Model &&) -> Model &=default |
Public Attributes | |
| VIPRA_MODEL_INIT_STEP | |
| _peds | masses |
| _peds | reactionTimes |
| _peds | maxSpeeds |
| _peds | shoulderLens |
| VIPRA_MODEL_TIMESTEP | |
| goals | |
| _peds | |
| Public Attributes inherited from VIPRA::Modules::Model | |
| virtual | VIPRA_MODEL_TIMESTEP = 0 |
| virtual | VIPRA_MODEL_INIT_STEP = 0 |
| virtual | VIPRA_MODEL_RESET = 0 |
Member Data Documentation
◆ masses
| _peds Model::Calm::masses |
Initial value:
= VIPRA::Random::make_distribution(
std::normal_distribution<VIPRA::f_pnt>{_config.meanMass, _config.massStdDev},
_peds.size(), engine)
◆ maxSpeeds
| _peds Model::Calm::maxSpeeds |
Initial value:
= VIPRA::Random::make_distribution<>(
std::normal_distribution<VIPRA::f_pnt>{_config.meanMaxSpeed,
_config.maxSpeedStdDev},
_peds.size(), engine)
◆ reactionTimes
| _peds Model::Calm::reactionTimes |
Initial value:
= VIPRA::Random::make_distribution<>(
std::normal_distribution<VIPRA::f_pnt>{_config.meanReactionTime,
_config.reactionTimeStdDev},
_peds.size(), engine)
◆ shoulderLens
| _peds Model::Calm::shoulderLens |
Initial value:
= VIPRA::Random::make_distribution<>(
std::normal_distribution<VIPRA::f_pnt>{_config.meanShoulderLen,
_config.shoulderLenStdDev},
_peds.size(), engine)
◆ VIPRA_MODEL_INIT_STEP
| Model::Calm::VIPRA_MODEL_INIT_STEP |
Initial value:
{
_peds.resize(pedset.num_pedestrians())
◆ VIPRA_MODEL_TIMESTEP
| Model::Calm::VIPRA_MODEL_TIMESTEP |
Initial value:
{
calc_shoulders(pedset.all_coords(), goals.current_goals())
The documentation for this class was generated from the following files:
- modules/model/Calm/calm_model.hpp
- modules/model/Calm/calm_model.cpp
Generated by